25-DOF工业级灵巧手
忆海原识最新研发的工业级高性能灵巧手结合独创类脑智能技术体系,解决机器人的灵巧操作、 认知导航、灵活移动、自主决策等难题,适合用于操作型机器人、实验室自动化、生产线自动化、 危险环境作业、科教平台等广阔的科研、生产、生活领域。
工业级标准
高可靠、易维护、易定制
模块化设计
通用化设计,组合式调整
全面自主设计
自主知识产权,全面国产
完整生态体系
快速推广自动化无人化场景
产品特性,版本及展示,更多产品详情请联系我们。
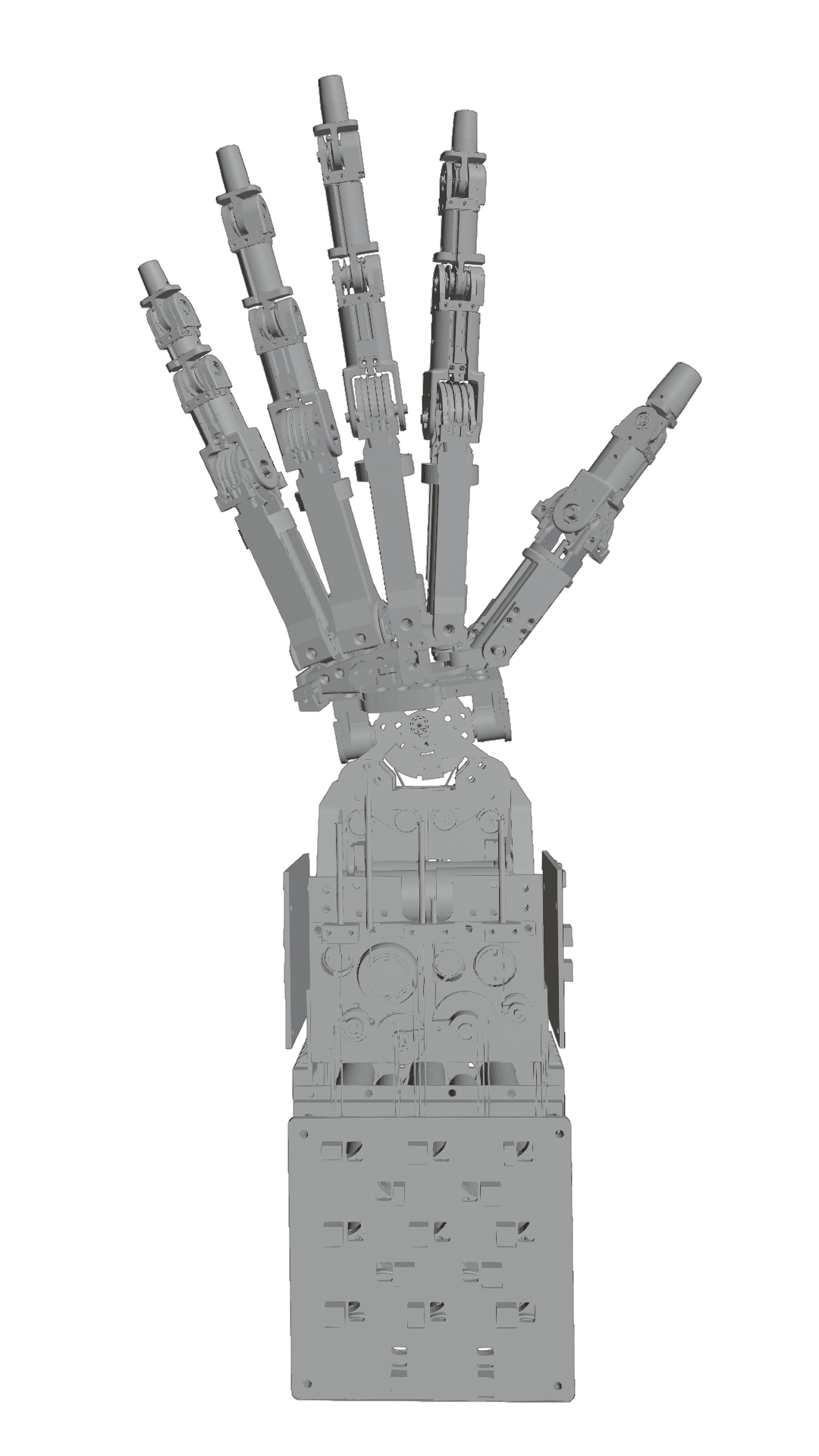
五指型灵巧手,能做抓、握、夹、捏等全部人手能够做的操作
手指数量;自由度12至32个;力量范围2KG到30KG; 皮肤;外壳;
位置、纹理、触觉、力和力矩等,指端及手掌各处;机械接口及SDK
程控、遥控、示教(操作员示范以后机器人即可自动完成操作)、类脑控制
自由度:
25主动
手指数:
5个
触觉:
无
皮肤:
无
动力源:
空心杯
传动:
百万次
通讯与控制:
0.5KHZ
自由度:
12-32主被动
手指数:
可定制
触觉:
指尖或全手
皮肤:
防水/尘/腐蚀等
动力源:
空心杯/铁芯
传动:
千万次
通讯与控制:
20KHZ




机器人完成化学、环境、生物、医学、病毒实验室中繁琐、危险的操作,解放研发人员

钻洞探水、支护、喷浆;操作各类设备;发生单次矿难,损失高达上亿,辐射到煤矿、金属矿

仓储分拣、上架;生产线搬运;机床操作、换刀具;移动协作机器人企业呈爆发增长每年近万台
人力成本高昂,培训周期长无产出,流转率高、招工难;解决产品规格及流程变化/设备失效等问题,解放人力

搭载灵巧手,在高温、高腐蚀环境下巡查检修工作;在管道系统中,做故障位置排查,修理等

为机器人添加灵巧的手,适应各种变化的操作环境

灵巧手控制系统采用多层级控制系统,包括:上位机部分、下位机部分
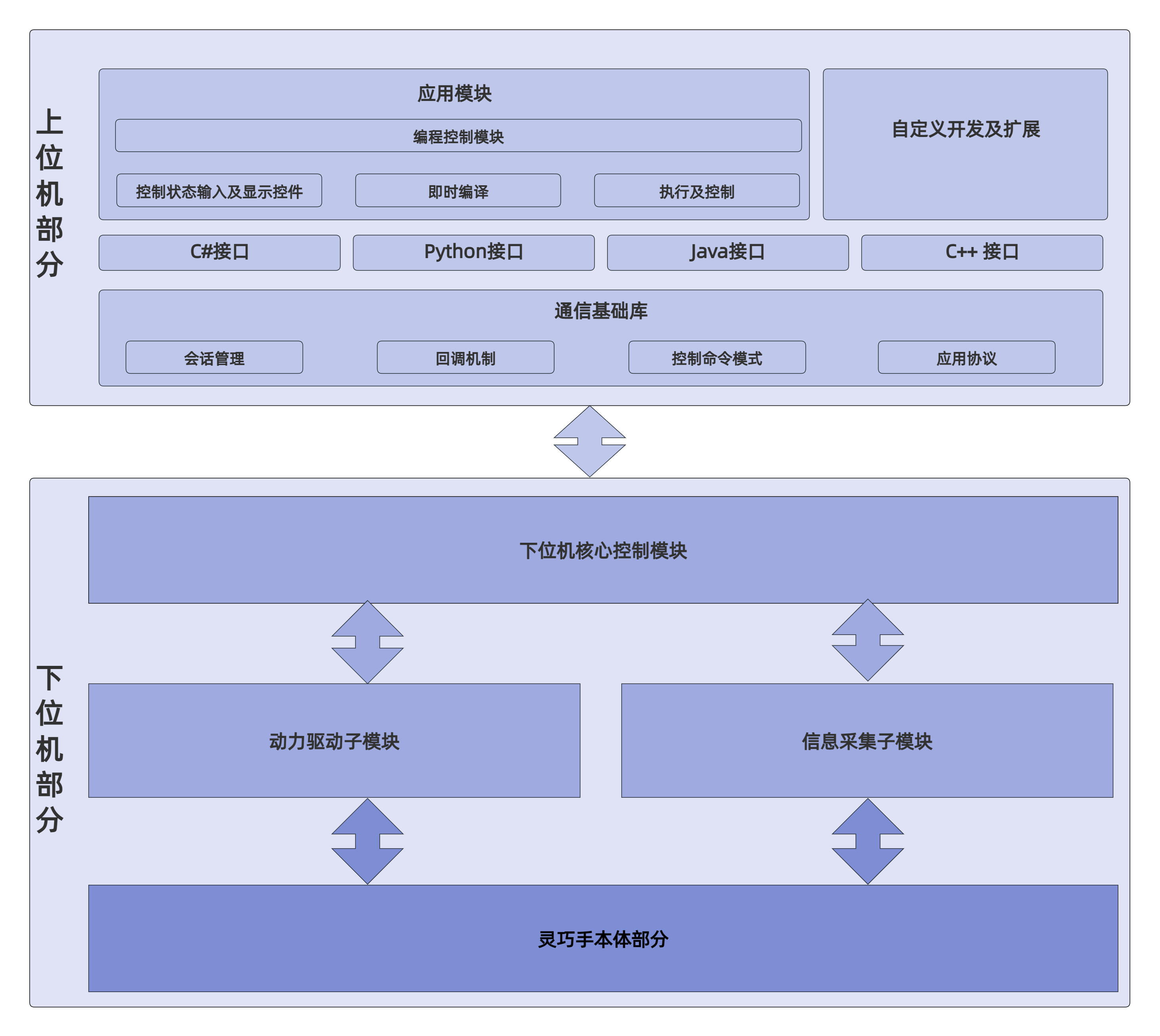
基于TCP/IP,使用专用会话层协议及应用层协议,稳定可靠
专为高频、低延迟设计
核心采用C++开发,支持C++/C#/Python/Java开发接口
支持在线编译及运行,实时查看灵巧手运行状态
模块进行通讯的枢纽,也承担内置运动控制的功能
管理灵巧手的各执行元件,提供电流(力矩)反馈
负责汇集传感信息,包括关节位置、力/力矩、触觉等
外观,连接件,运动组件,传感器组件等
命令式编程,支持多种控制模式,完整的生态体系
多样式命令
启停/订阅/关节/电机
异步通信
异步通信,回调机制
关节控制
角度/角速度/刚度/力矩等
电机控制
电压/电流/方向等
透传控制
力矩优先/位置优先
开闭环模式
下位机开闭环/上位机闭环
类脑控制
可实现灵活的运动规划与控制
系统支持
支持Windows/Linux平台
多语言支持
C++/C#/Python/Java
手势采集模块
手势控制,示教
3D仿真模块
环境仿真,控制仿真
类脑智能和灵巧手,让机器人心灵手巧
深圳市龙岗区天安云谷产业园
188 4693 0758
rhlchief@163.com
